Sensor Capture 기능 사용 방법
IMPORTANT 기능을 사용하기 위해서는 Sensor 모델이 모두 연결 되어있어야 한다.
Sensor 설정은 다음 페이지를 참조한다.
Sensor Capture시 저장되는 데이터는 Setting되어 있는 Ground Truth타입에 따라 데이터가 저장된다.
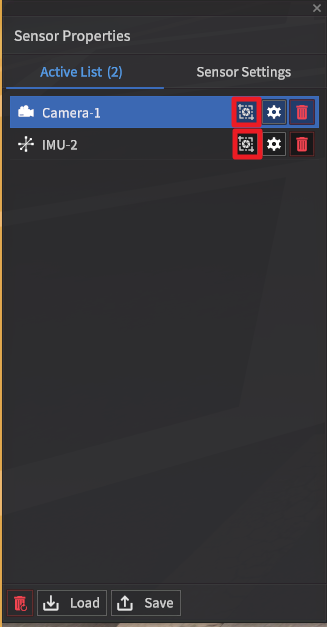
Sensor의 모든 Ground Truth 데이터를 저장 하고자하면 Active List에서 아래 표시된 버튼을 클릭 후 Capture한다.
3D LiDAR 관련 수정 사항 (22.R2.0 버전부터 해당함)
Sensor Capture 모드에서 Gaussian Noise 사용 시 3D LiDAR Intensity Type 모두 (Intensity, Semantic, Instance) 동일한 Distance을 갖게 수정
3D LiDAR Velarray H800/M1600, VLP32 모델 에서 Sensor Capture 모드 값 출력 에러 수정
ROS 메세지를 이용한 capture 기능
ROS 메세지를 이용하여 순간의 Sensor 데이터를 저장 할 수 있다
SensorSyncDataSubscriber
키보드 조작을 이용한 capture 기능